

������Q���V�������Ԅӻ��O������˾
ϵ�ˣ��R����������
ϵ�֙C��
�̶��Ԓ��
��I�]�䣺2849382866@qq.com
ϵ��ַ���V������ɳ�^���悔��a���@1��201��
�]����511480
ϵ�ҕr��Ո�f���ھ��|�W�Ͽ����ģ��x�x��
|
|
SIMATIC S7-1200��ģ�Mݔ�룬 SM 1231 TC�����ż 4 ģ�Mݔ�� | |
| һ����Ϣ | ||
| �aƷ��͘�־ | SM 1231��AI 4x16 bit TC | |
| �Դ늉����uȫ�����T��S7-1200SM1231���żģ�K��Ʒ | ||
| �~��ֵ (DC) | ||
| �� DC 24 V | �� | |
| ݔ����� | ||
| �������������ֵ | 40 mA���uȫ�����T��S7-1200SM1231���żģ�K��Ʒ | |
| ���Ա��忂�� DC 5 V������ֵ | 80 mA | |
| ���ʓpʧ | ||
| ���ʓpʧ������ֵ | 1.5 W | |
| ģ�Mݔ�� | ||
| ģ�Mݔ��˔��� | 4; ���ż | |
| 늉�ݔ�����S��ݔ��늉����������ƣ������ֵ | ��35 V | |
| �ضȜy���ļ��g��λ�����{�� | �z�϶�/�A�϶� | |
| ݔ�뷶�����uȫ�����T��S7-1200SM1231���żģ�K��Ʒ | ||
| �� 늉� | �� | |
| �� ��� | �� | |
| �� ���ż | ��; J, K, T, E, R, S, N, C, TXK/XK(L)��늉���������80 mV | |
| �� ���ض�Ӌ | �� | |
| �� ��� | �� | |
| ݔ�뷶�����~��ֵ����늉� | ||
| �� -80 mV �� +80 mV | �� | |
| �� ݔ����裨-80 mV �� +80 mV�� | ��1 �ךW | |





? ���ÿɴ惦�����b���еij����M�ж�λ����������׃��
���×l���Լ�ᘌ�֮ǰ�����^���S���е��ض��΄�
? ʹ�� STARTER ���������
? ������������Ϣ�����uȫ�����T��S7-1200SM1231���żģ�K��Ʒ
- ���I��̖�����I���ݣ��綨λ���ȴ������D��ָ�������O
�ö��M��ݔ�����Ƅӵ��̶�ֹͣ�c��
- �\�ӿ��ƅ��� ��Ŀ��λ�á��ٶȡ����ټ����{��
- ģʽ �������[�س����^�m�����΄յėl�����������uȫ�����T��S7-1200SM1231���żģ�K��Ʒ
�� ֹͣ���^�m���� ��(Continue_with_stop)�� �� �B�m����
��(Continue_flying) �� �� �����ⲿ����̽�^ݔ���^�m����
��(Continue_externally using high-speed probe inputs)��
- ���I���� ����ȴ��r�g������B�����uȫ�����T��S7-1200SM1231���żģ�K��Ʒ
ֱ���O���cݔ�� (MDI) ģʽ
? ʹ��ֱ���O���cݔ�루��ͨ�^ PLC �е��^�̔������M�У��^��
����������λ���O�� ���B�m�]�hλ�ÿ��ƣ�
? ���Ƅ��^����ʼ�K���Ը��A�\�ӿ��ƅ��������܄ӑB�O���c����
Ҳ�������O��ģʽ�c��λģʽ֮�g�ӑB�ГQ��
? ����Sδ���㣬Ҳ����������λ���O��ģʽ��ʹ��ֱ���O���c
ݔ���\��ģʽ (MDI)���@��ζ����ʹ�á��ӑB���������F�ӑBͬ��
�Լ����»��㡣���uȫ�����T��S7-1200SM1231���żģ�K��Ʒ
�c��ģʽ
? ͨ�^���B�mλ�ÿ��ơ����c��������ģʽ���F�S���]�hλ�ÿ��ƣ�
�@�ɷNģʽ���ГQ ���������L���Ƅ�
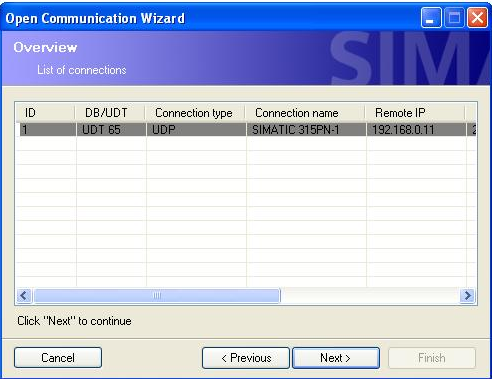
�ڈD10�ж��x��partnet A����UDPͨ�ŵĔ����B�ӽY�������QUDT65�͵�ַ�����K�����QUDT66�����Ŀopen_UDP_wizard���x��K�ļ��A���c����һ����D11��ʾ������һ���_ʼ���g����D12��ʾ��
�D11
�D12
���g�o�`����D13��ʾ��
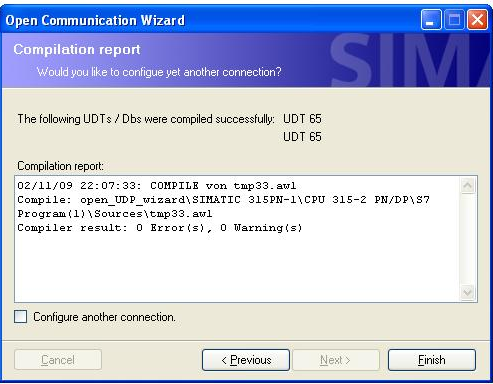
�D13
�c��Finish��������á��@�����Ŀopen_UDP_wizard�ĉK��������UDT65, UDT66,��D14��ʾ��
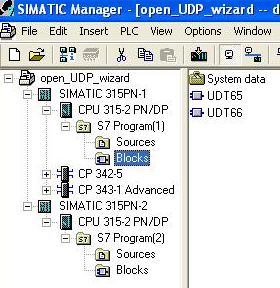
�D14
��ͬ�ӵIJ��E��SIMATIC 315PN-2 վ������������ú���SIMATIC 315PN-2վ�ĉK��������UDT65��UDT66��
4. ��STEP7�О��Ŀopen_UDP_wizard��������
���Ȟ�partner A����������SIMATIC 315PN-1�ĉK�Є���DB101�����xһ��׃��DB_VAR��׃����͞�UDT65����D15��ʾ��
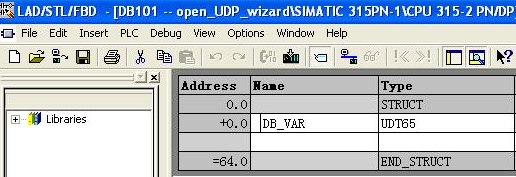
�D15
��������DB102�����xһ��׃��DB_VAR��׃����͞�UDT66����D16��ʾ��

























